
Here’s a doggo friend:

Let’s call her Smartie.
There’s a cube on the left. I want Smartie to walk to the cube. This is quite easy to do using components MalberS supplies, with no programming. But that’s not the point of this post.
Here’s Smartie in the hierarchy:
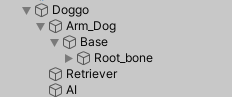
Doggo has three children. Arm_Dog is the bones and such. Retriever is the skin. AI is… the AI.
Here’s Doggo in the inspector:
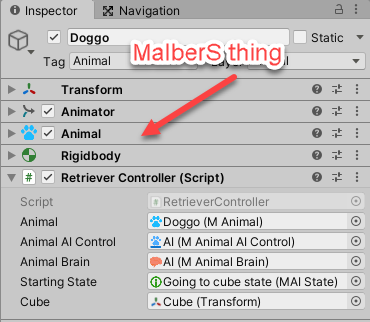
Animal is MalberS’ animal controller. Retriever Controller is my own script, to test the three methods covered here.
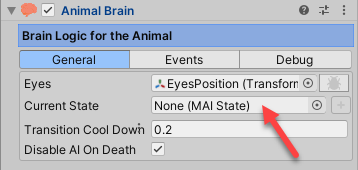
Here’s AI:
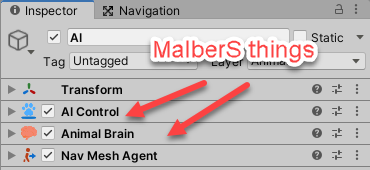
It has two MalberS’ components: AI Control and Animal Brain.
It helps to think of Doggo as having a stack:
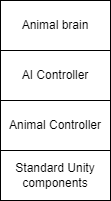
At the bottom are the usual components, like an animator, rigid body, and such.
Riding on top of them is an animal controller (AC). It handles animal body actions, like running, walking, and swimming. It doesn’t know where the animal is running to, just that it’s running. To do its work, the AC uses the components below it. For example, it sets parameters defined on the animator.
Above AC is an AI controller (AIC). Its main job is to tell the animal to go somewhere. It handles things like starting and stopping the animal. It uses AC to handle the body movements, and a nav mesh agent to find routes.
Above that is the animal brain (AB). It works at a tactical level. Like, go around some waypoints, and if you see an enemy, alert your friends, and attack. If your health gets too low, run away. AB uses AIC to navigate.
The layer model isn’t strict. For example, AB (tactical) can reach down to AC (body control) directly, bypassing AIC (navigate). An animal can stop and howl, without changing its destination, so the navigator doesn’t need to be involved.
So, custom code can interact with AC to control the animal’s body, AIC to control navigation, and AB to implement tactics, like running away. Let’s see how, with the simple task of walking to a cube.
A third way to get to the cube is to use the animal brain (AB) component. No code is needed, just a lot of configuration. ABs have AI states, different from the body states of AC.
A state is a task sequence, and a decision sequence. Here’s the go-to-cube state:
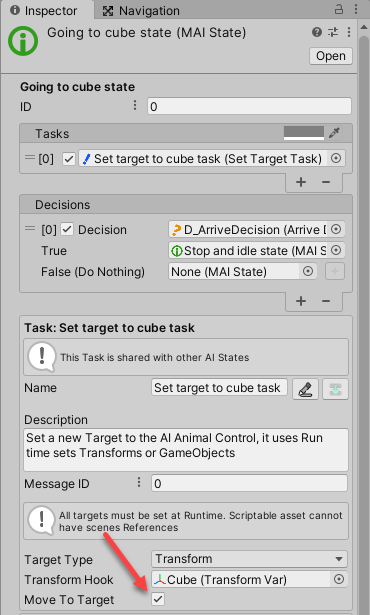
The state has one task and one decision. The deets of the task are shown under the state. All states have some shared variables, like the current target. Once set, it carries over to other tasks, until it’s reset. The task type, setting the current target, is one of a bunch of task types MalberS provides.
The Move To Target checkbox tells the brain to set the target and then start the animal moving. I could have broken it up into two tasks:
- Set the target
- Start moving
Using the checkbox was easier. Easy is good.
Take a look at the way you set the target:
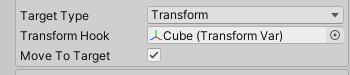
I thought I would drag the cube into a field, but that’s not how it works. There’s a hook whatsit. You add a component to the thing you want to target:
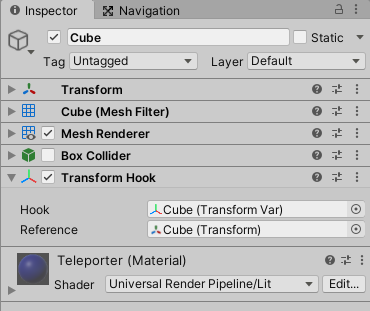
The transform var object links references in tasks to game objects.
States use one or more decision objects to control transitions to other states. The decision objects return either true or false. In this case:
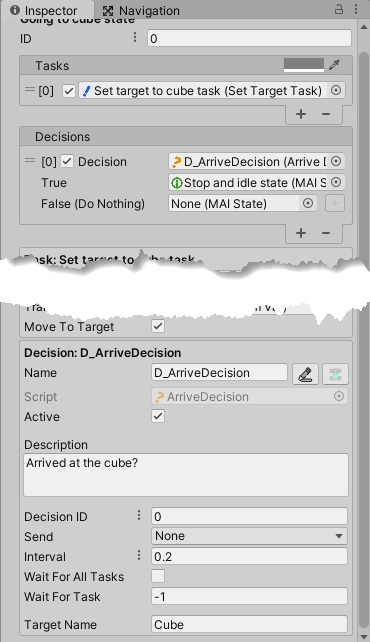
If the animal has arrived, enter the Stop and idle state. Otherwise, stay in the Go to cube state.
To get this started in C#: